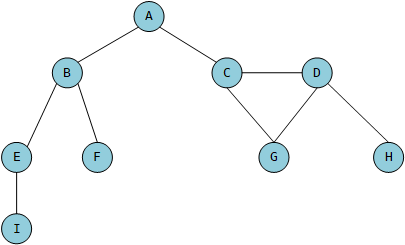
图也是一种非线性的数据结构,是网络结构的抽象模型,是一组由边连接的节点。图的表示法:
G = (V,E),其中V表示一组节点,E表示一组边。
图论的理解有点难度,这里也是介绍一些基本点,仅仅包括图的表示和遍历。因为图论又有好多图,实在是好累。
图的一些概念
相邻顶点
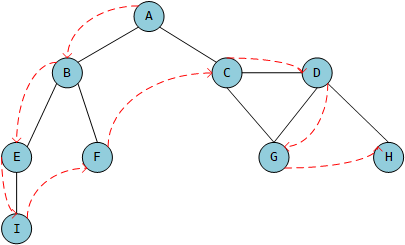
由一条边连接在一起的顶点叫做相邻顶点。
顶点的度
一个顶点的度是其相邻顶点的数量。比如,A的度是3。
路径
路径是顶点v1,v2,…,vk的一个连续序列,其中vi和vi+1是相邻的。比如,ABEI就是一条路径。
简单路径要求不包含重复的顶点。
图的分类
有向图和无向图
按照边是否有方向。
加权图
图的边赋予权值。
有环图和无环图
按照图中是否存在环进行的分类。
图的表示
这里仅介绍两种常用的表示方法。
邻接矩阵
如果索引为i的节点和索引为j的节点相邻,则array[i][j] ==== 1;否则,array[i][j] === 0。
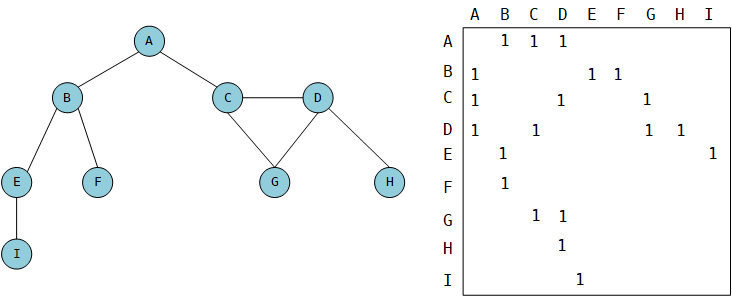
图中为0的部分被省略了,因为画图实在太累。
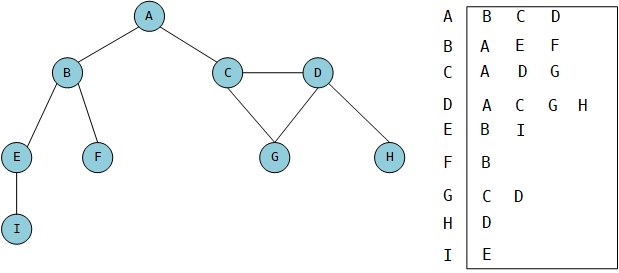
邻接表
另一种方式就是邻接表。这是一种动态的数据结构,通常情况下,我们会使用链表的结构。
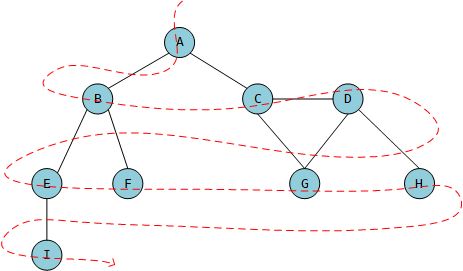
图的遍历
有两种算法可以对图进行遍历: 广度优先搜索(Breadth-First Search, BFS)和深度优先搜索(Depth-First Search, DFS)。图遍历可以用来寻找特定的顶点或寻找两个顶点之间的路径,检查图是否连通,检查图是否含有环等。
图遍历的思想是:
追踪每个第一次访问的节点,并且追踪有哪些节点还没有被完全探索。对于两种遍历方法,都需要指明第一个被访问的顶点。完全探索一个顶点要求我们查看该顶点的每一条边。为了保证算法的效率,务必访问每个顶点至多两次。
| 算法 | 数据结构 | 描述 |
|---|---|---|
| 广度优先搜索 | 队列 | 将顶点存入队列中,最先如队列的顶点先被探索 |
| 深度优先搜索 | 栈 | 将顶点存入栈中,顶点是沿着路径被探索的,存在新的相邻节点就去探索 |
广度优先搜索
广度优先搜索的动画演示: Data Structure Visualizations
- 创建一个队列Q
- 将v标注为被发现,并将v入队列Q
- 如果Q非空,则:
- 将u从Q从出队列;
- 标注u为被发现;
- 将u所有未被访问过的邻点入队列;
- u标注为已被探索。
广度优先搜索的应用: 寻找最短路径
深度优先搜素
深度优先搜索的动画演示: Data Structure Visualizations
深度优先搜索算法将会从第一个指定的顶点开始遍历图,沿着路径直到这条路径最后一个顶点被访问了,接着原路回退并探索下一条路径。
要访问顶点v,步骤如下:
- 标注v为被发现
- 对于v的所有未访问的邻点w
- 访问顶点w(递归)
- 标注v已被探索
可以看见,深度优先搜索的步骤是递归的。
深度优先搜索的应用:拓扑排序
有关图论还有很多方面,看来我以后得好好啃一下了。拜。